残念ながら?現状ではLinuxのみ利用可なんですよね。このソフト。
もう少し慣れてから詳しいやり方を共有できればなと思います。てか、必死になりすぎて記録するの忘れた…。
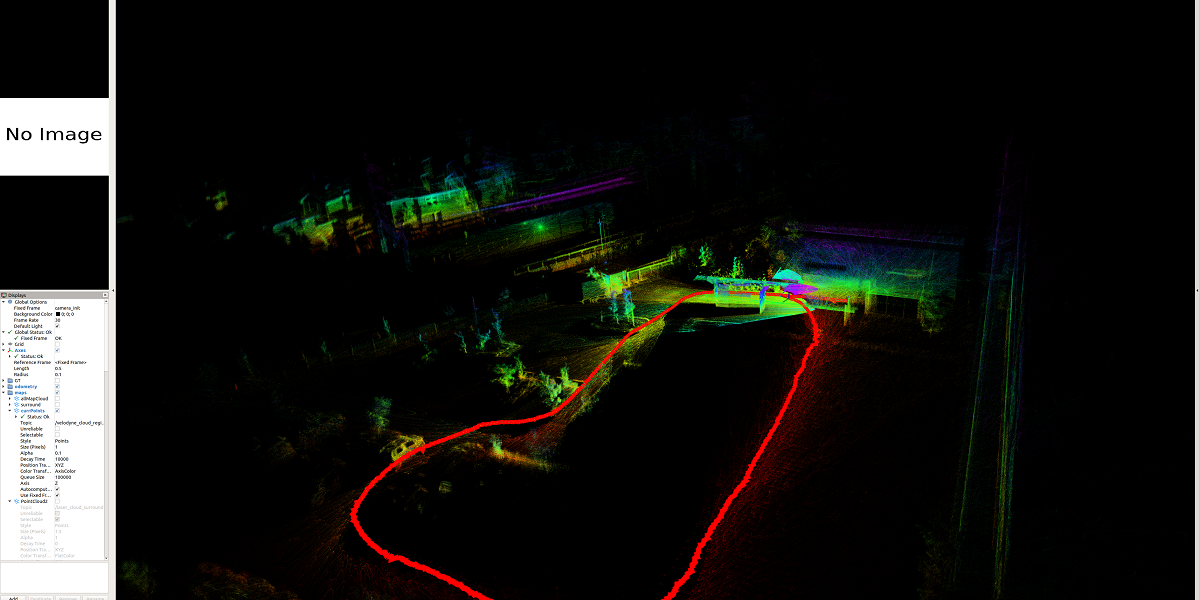
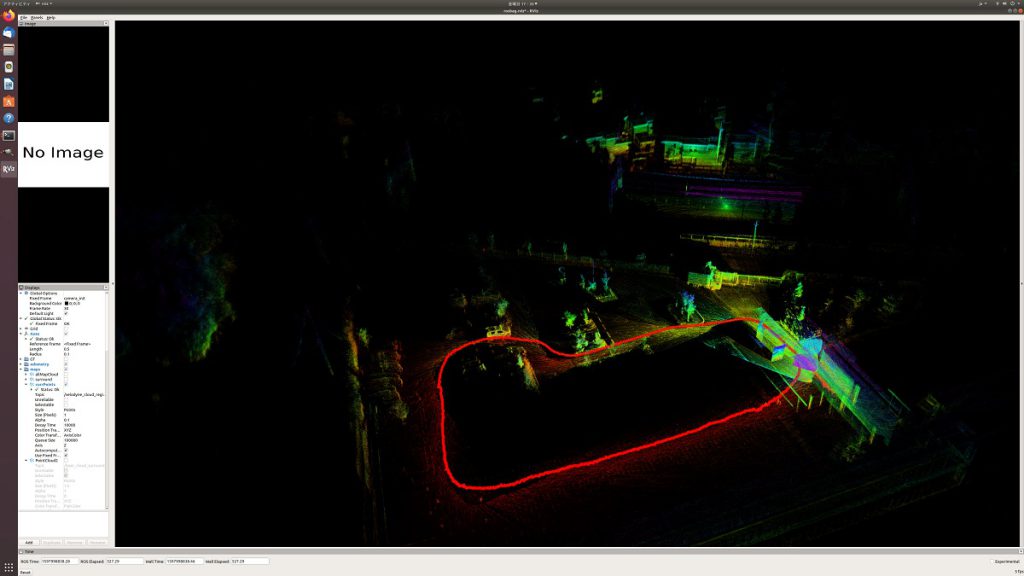
GPSとかIMUとか無しで、できるって凄いよね。これ。
早速、統合して、表示します。rvizでまずみてみましょう。
奈良文化財研究所本庁舎駐車場です。

計測された情報はrosbagファイル(.bag)として出力されます。このままでは読み込めないので、変換してPCDファイルとして出力します。
します、が…。
めっちゃバラバラというか、断片化している!
大体数十kB単位。
個別に読み込むと、わずかな一部のみ表示されます。うーむ。
PCDが読めるCloudcompareでまとめて読み込むと、形は何となく読んでくれるのですが、ある程度(1000くらい?)でファイル数多すぎんじゃゴラあ!って怒られます。
探したところ、解決してくださっている方が!
pcl_rosを使ってrosbag->pcdファイル変換 → 大量のpcdファイルが作成されてしまったのでpcd結合パッケージを作成
ありがたやありがたやありがたや…(ー人ー)
ひとまず、今回はここまで。